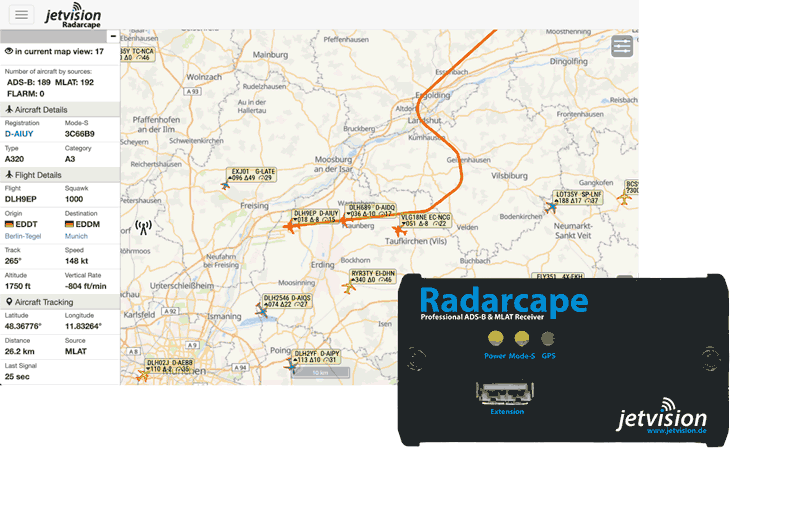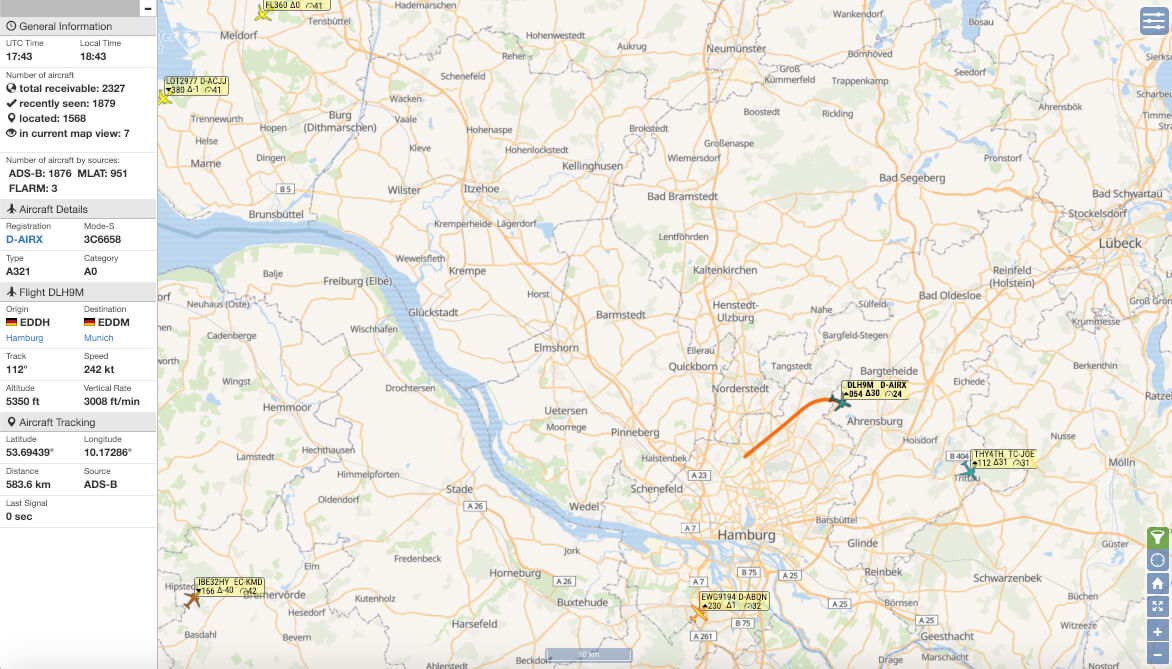
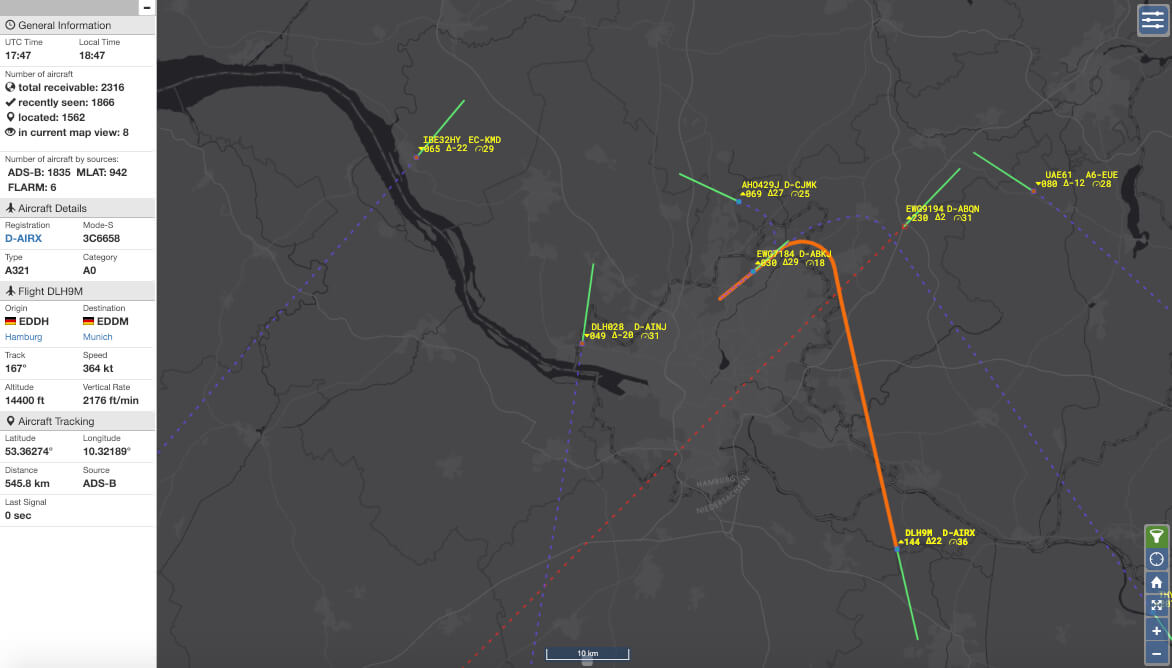
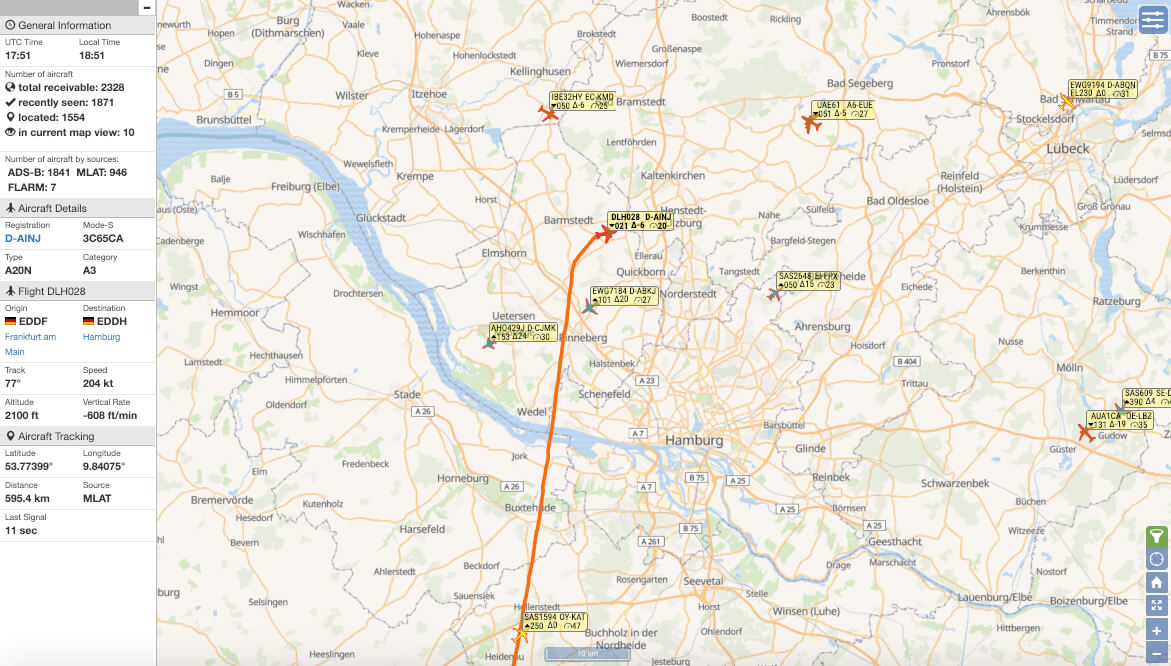
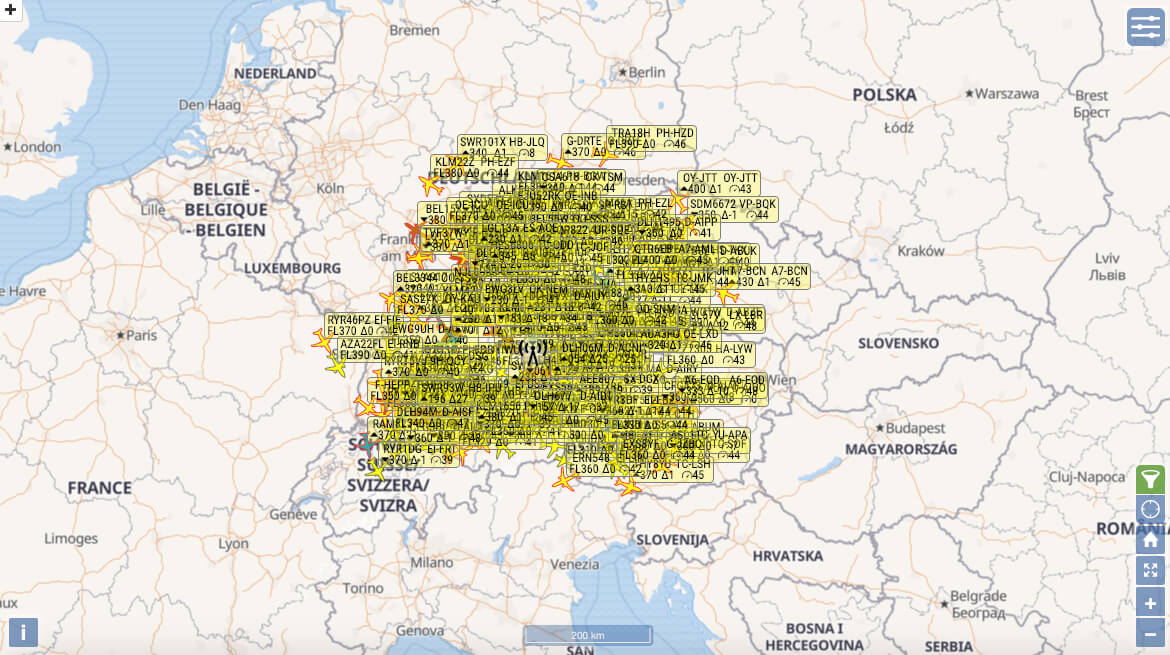
OSM Map (no Overlays)

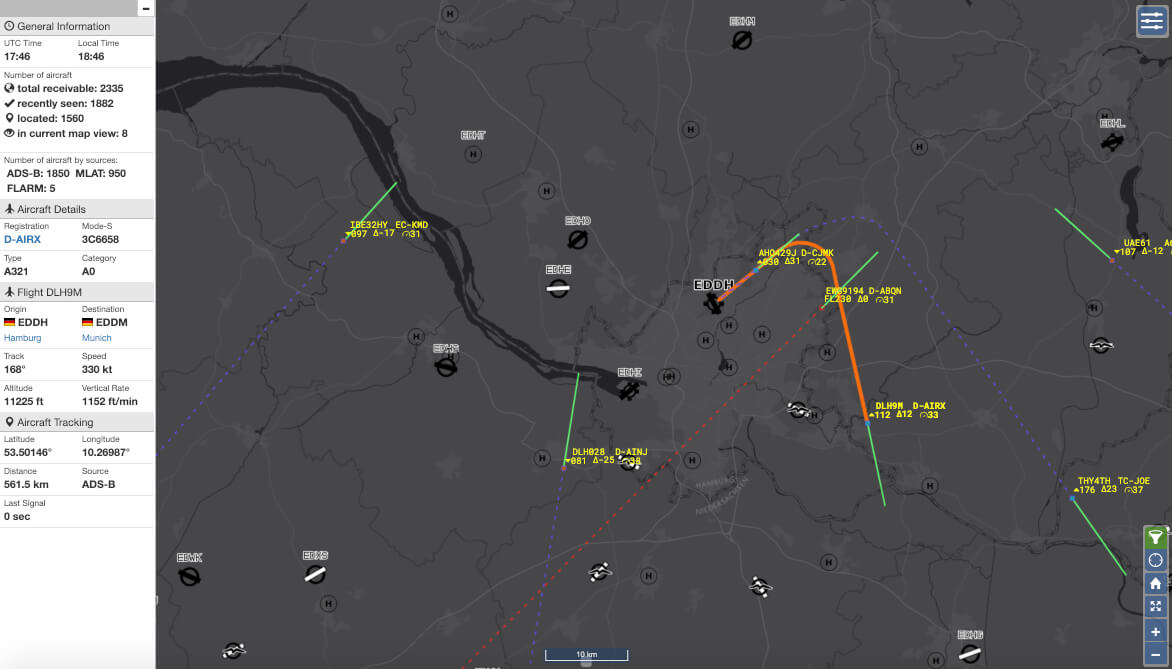
OSM Map - Airports
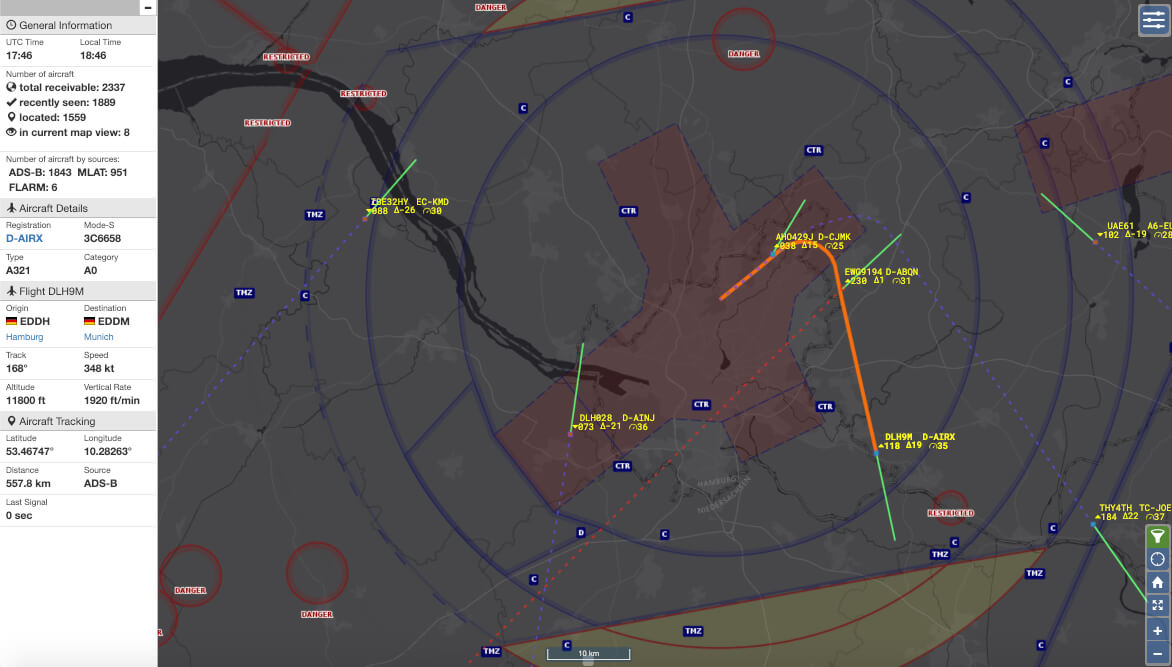
OSM Map - Zones
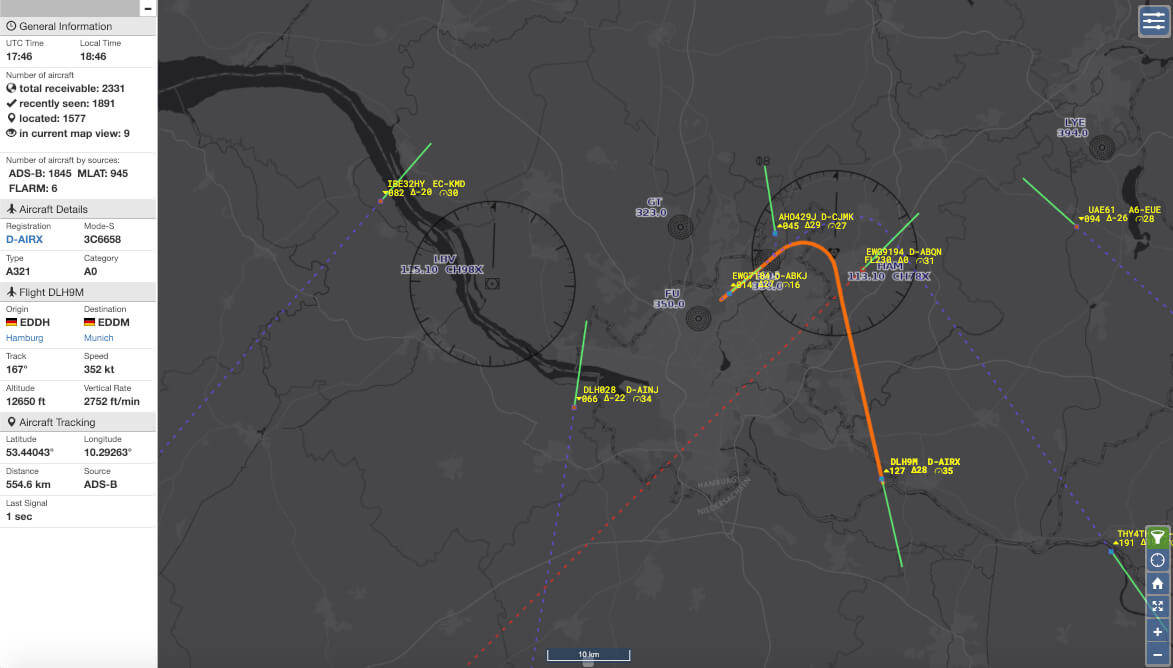
OSM Map - Navaids
ATC Map - Airports
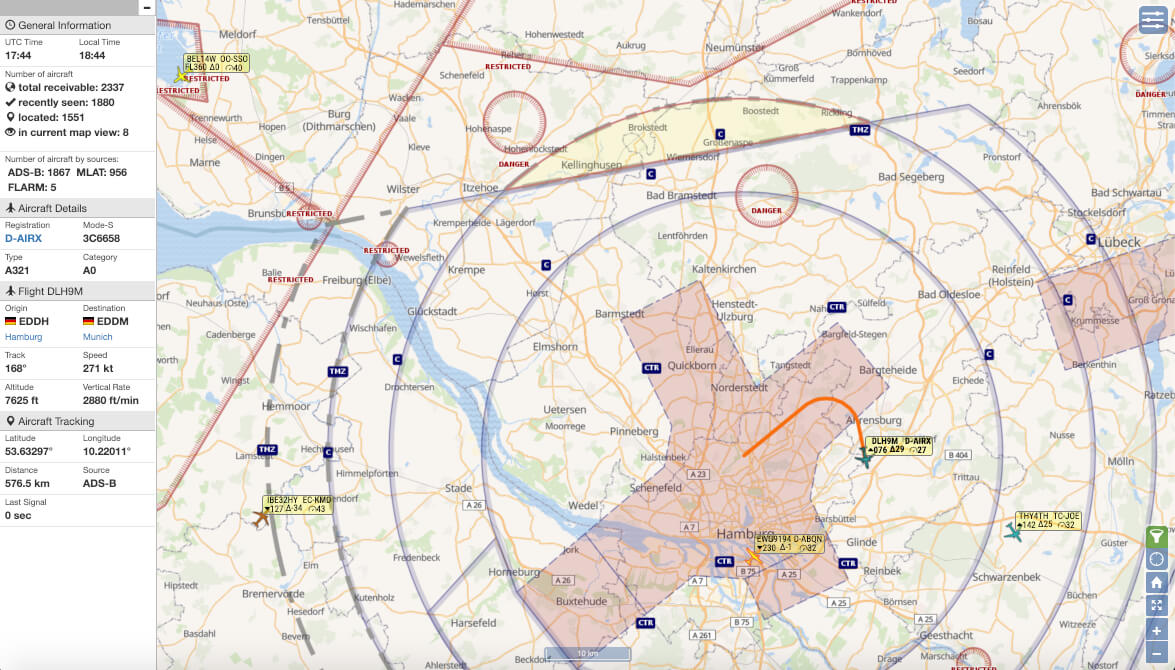
ATC Map - Zones
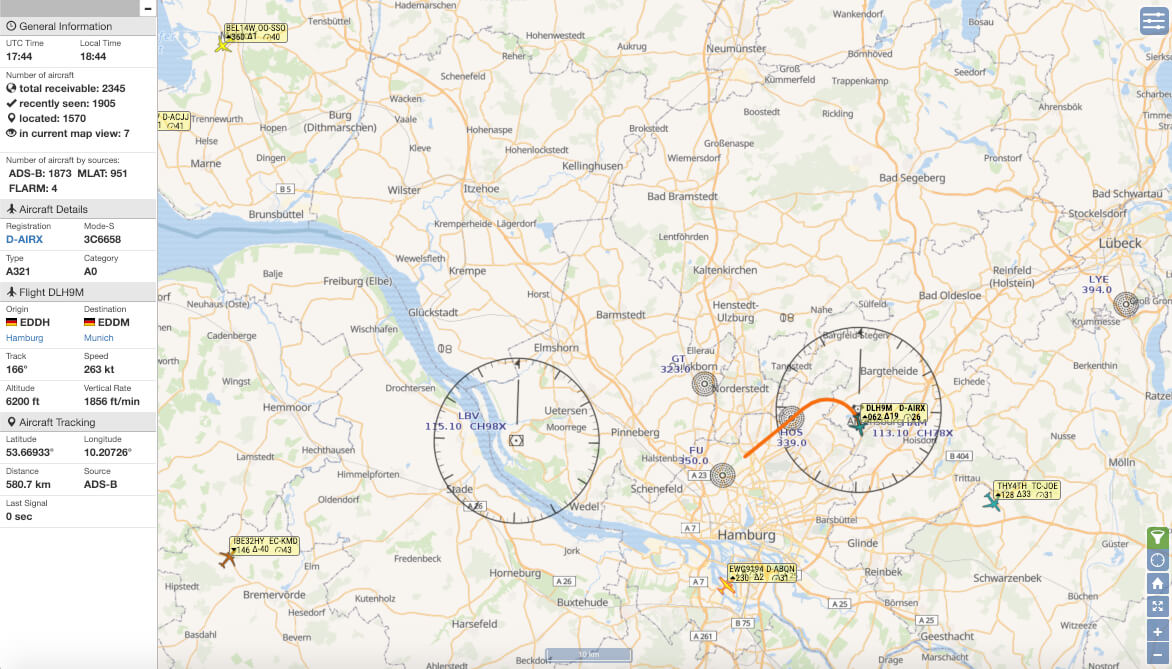
ATC Map - Navaids
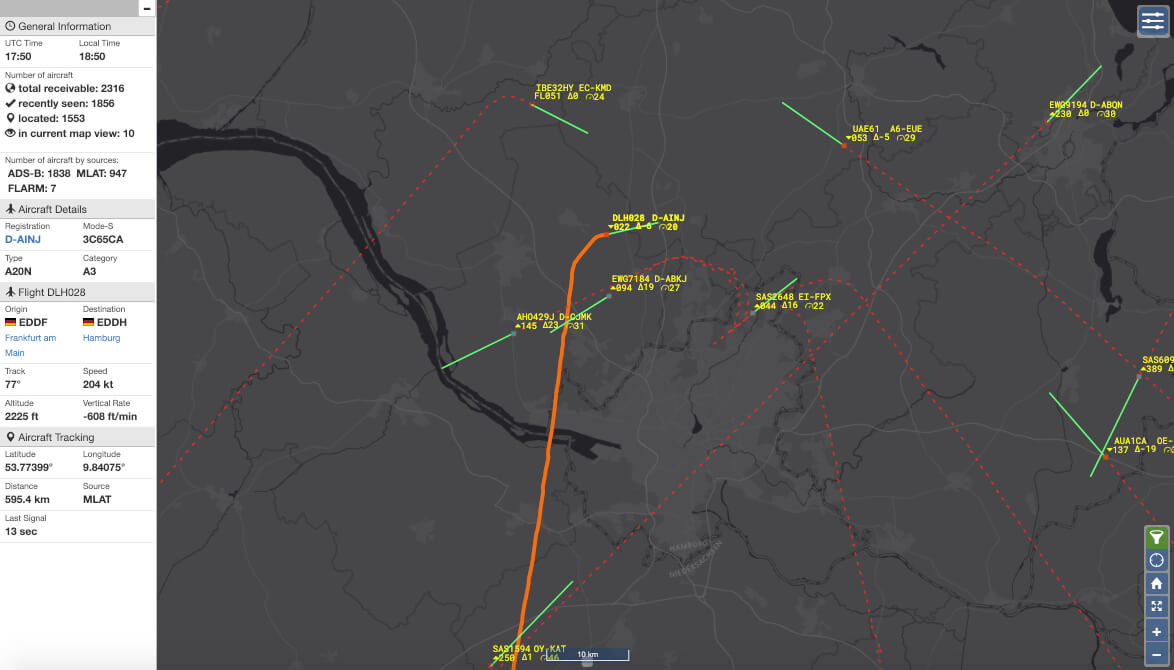
ATC Map (no Overlays)
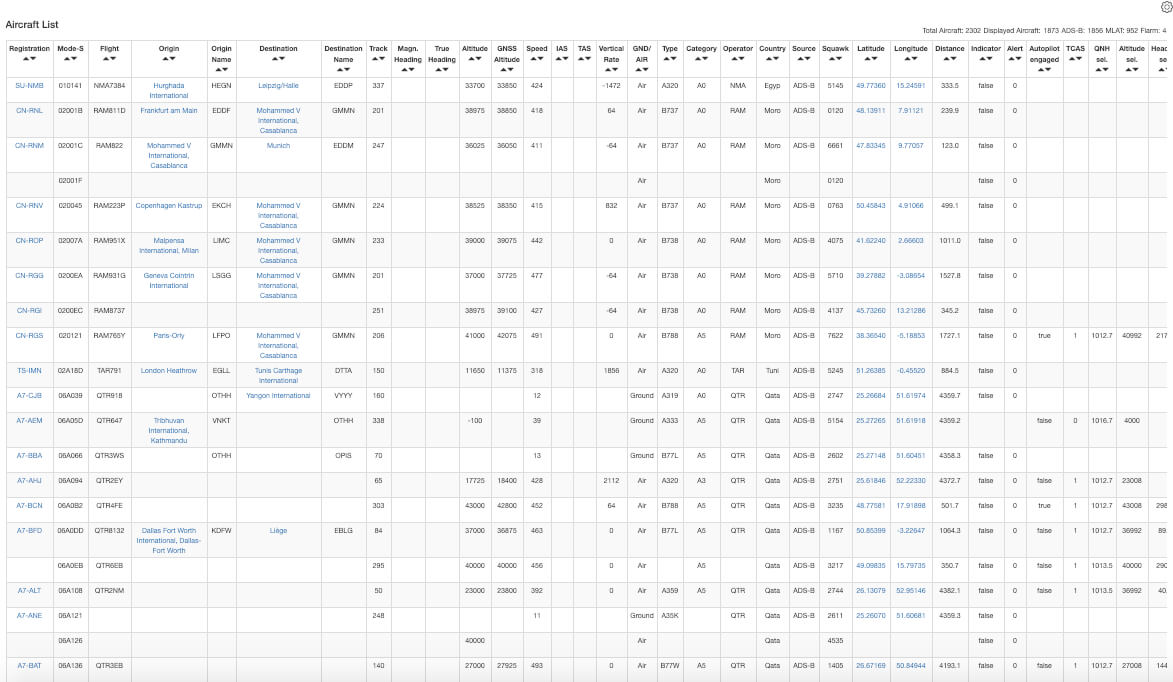
Aircraft List (Detail)
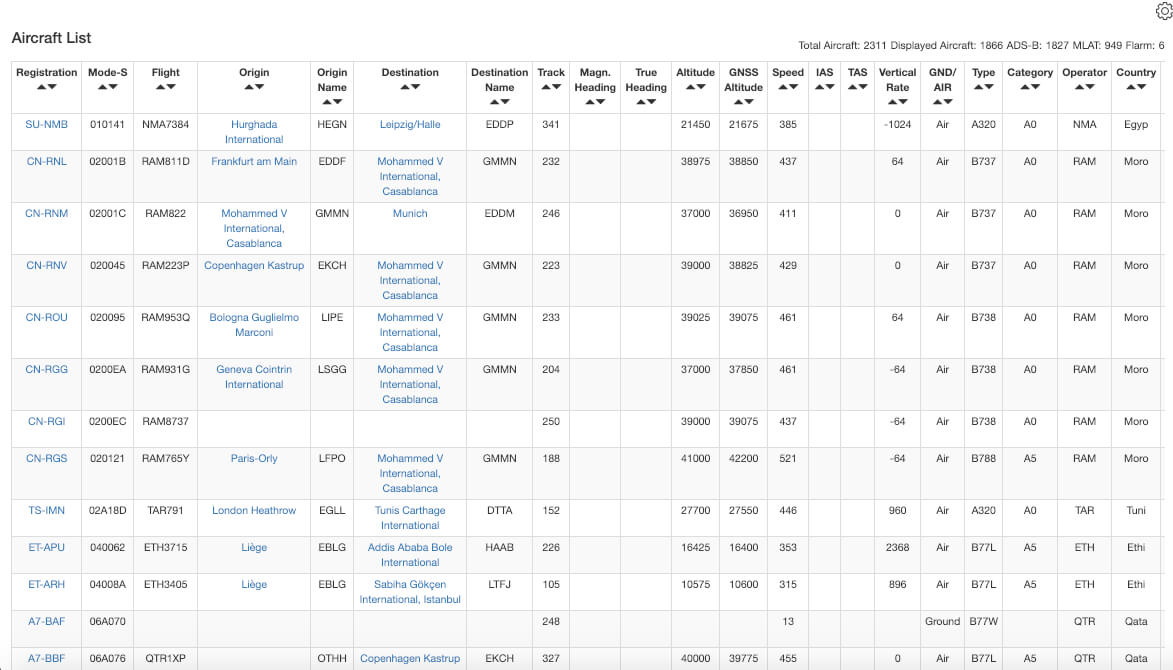
Aircraft List (Overview)
OSM Map - Multilateration (MLAT)
ATC Map - Multilateration (MLAT)
Receiver Range Performance
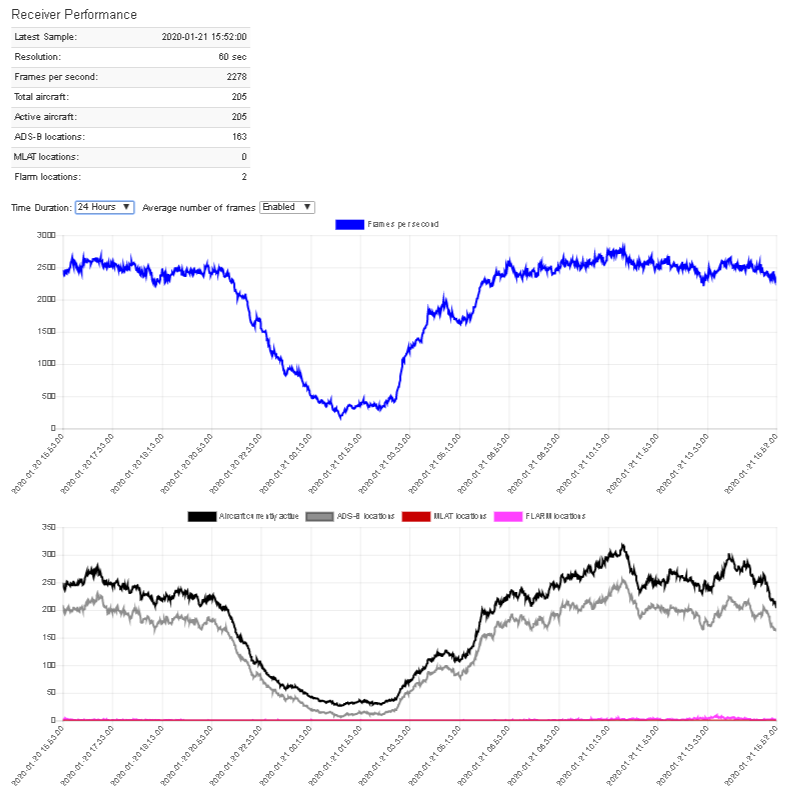
Receiver Performance
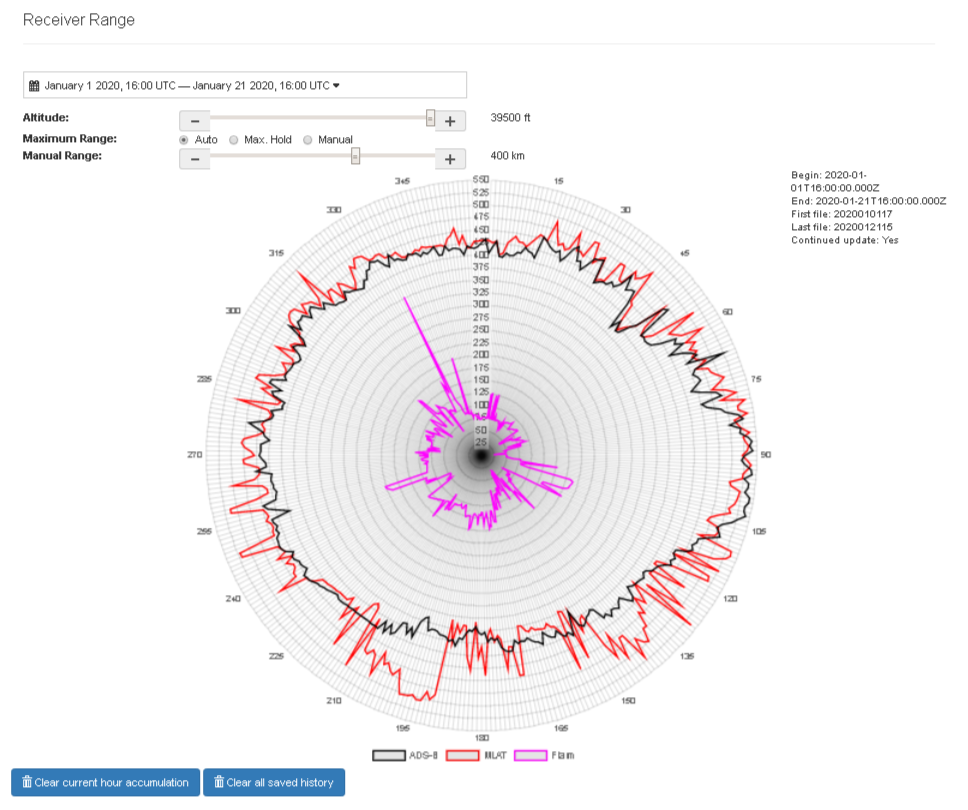
Range Diagram
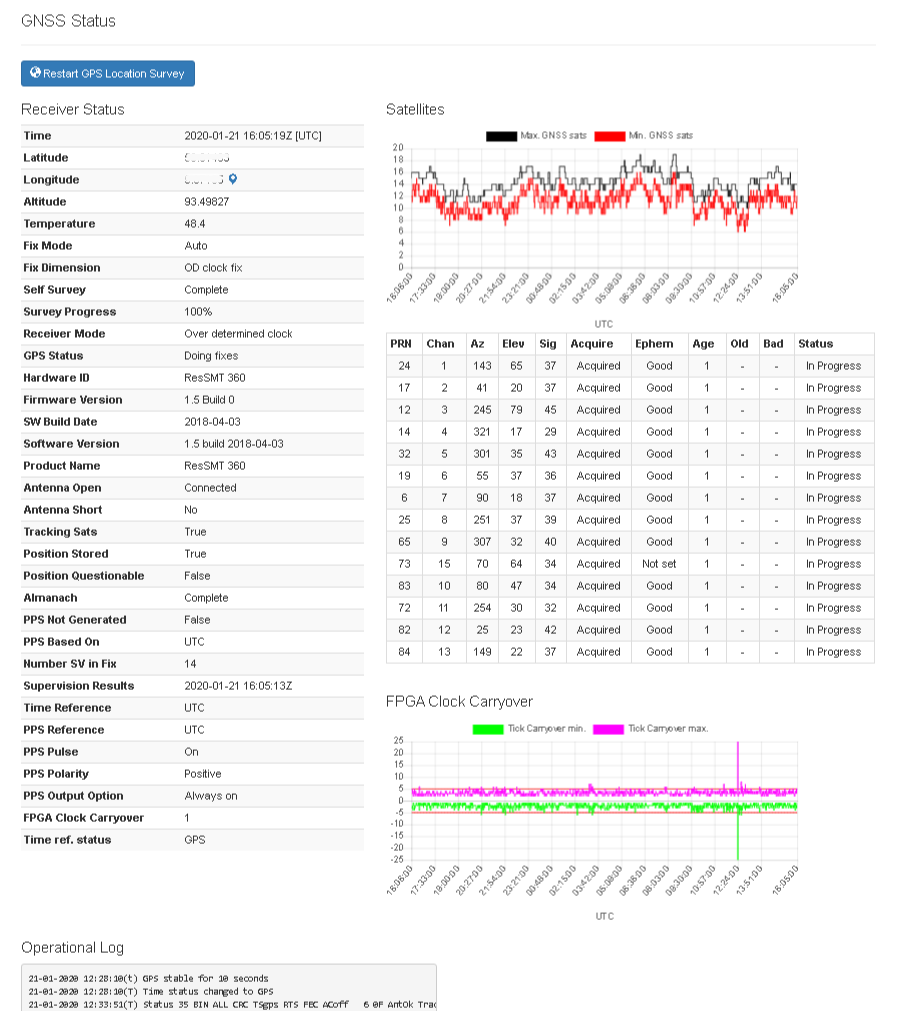
GPS Status
Connected FLARM